

- Home
- Companies
- RoboTech Vision Ltd.
- Products
- RoboTech CRAWLER - Caster Indoor and ...
RoboTech CRAWLER - Caster Indoor and Outdoor Robotic Platform
The Caster indoor mobile robot is a versatile and adaptable platform engineered for predominantly indoor use, yet it is equipped to handle specific outdoor environments like paved roads. With a load capacity of up to 75 kilograms, the Caster is designed for rigorous operations, offering high performance over uneven terrain due to its differential wheel chassis, large wheels, and gearless drives. These features facilitate quiet, fast, and maintenance-free movements, while the regenerative braking function enhances efficiency by extending operational duration. The robot is highly precise due to its positional control system and can be transformed with various optional equipment, including a robotic arm and an RTV sensor box for autonomous functioning. Its versatile nature allows it to fulfill diverse roles such as a disinfection robot with UVC lamps or as part of research and development platforms, catering to environments where high precision and adaptability are required. It supports various control modes and feedback systems to ensure optimal performance across tasks.
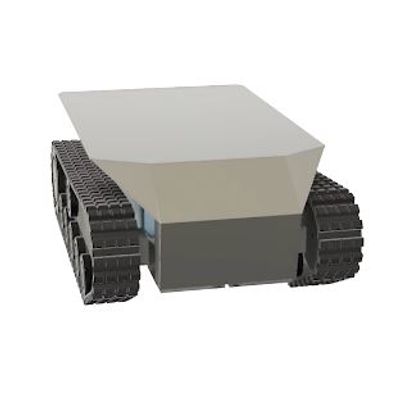
Offroad robotic platform
The Crawler robotic platform is designed primarily for the offroad environment. Durability, terrain capabilities and a low center of gravity are the basis for the robot’s movement in difficult terrain and on unpaved surfaces. The device is thus also suitable for agricultural or research purposes. Crawler can be loaded with an 80 kilogram load.
The base of the robot is a differential track chassis. Extremely quiet and smooth operation is ensured by BLDC motors with worm gearboxes, which are maintenance-free. Durable tracks ensure traction on any surface. The robot meets the IP65 specification, so it can work in any weather. It can be supplemented with a robotic arm, RTV Sensor Box for autonomous movement or other equipment as required.
Quiet
Crawler does not disturb its surroundings. It is ensured by the BLDC drives with worm gearboxes that drive rubber tracks.
Powerful, maintenance-free
Brushless drives and worm gearboxes with a lifetime oil filling guarantee high torque and maintenance-free operation.
Precise
Precise position control of the robot predestines it for operations that require high precision device movement in the environment.
Intelligent
The robot uses AI elements with which it recognizes objects and can, for example, autonomously come to the docking station to recharge.
Strong
The load capacity and high torque predetermine the robot for carrying heavy loads and pulling various tools, for example for tillage.
Universal
The possibility to use the robot in different environments and for different types of tasks makes it an adaptable robotic platform.
Crawler as a vineyard robot
One of the practical applications of the Crawler mobile robot is its deployment in the field of agriculture. An example is the use of the platform in a wine-growing environment, where it found its use as an autonomous device mowing the space between the rows of vine. In addition to its movement, Crawler can also use sensors to collect data intended for disease prediction. The robot can then label the damaged roots with a robotic arm.
R&D platform
Basic platform suitable for universities and research institutions for algorithm development. The platform can be supplemented with sensor, software or outputs for other devices as required.
Teleoperator
A platform suitable as a service robot for demanding terrain, controlled by a teleoperator using the application. Possibility to equip the robot with a sensor system, a robotic arm or other equipment as required.
Autonomous
An autonomous platform designed for outdoor environment. The robot is equipped with an RTV Sensor Box and AVN algorithm. The device moves autonomously in the rows of vine or in an orchard and solves operations such as mowing, local spraying or collection of samples needed to predict diseases.
Dimensions
- Width: 600 mm
- Height: 370 mm
- Length: 1000 mm
- Track height: 250 mm
- Weight: 70 kg
Power supply
- Power supply: 24V/35Ah AGM
- Charging: 230V adapter
- Charging time: 4 h
Features
- Operating time: 2 h
- Load capacity: 80 kg
- Maximum speed: 4 km/h
Drives and control
- Drives: 2x BLDC HUB 500W 24V
- Gearbox: worm
- Drive control: positional
Computational unit
- According to type and application (standard Advantech industrial PC)
Inputs and outputs
Data:
- 2xRJ45/1Gbit
- 2x USB
Voltage:
- 12V/10A
- 5V, 12V a 24V (depending on requirements)
Connectivity:
- Wifi 2.4 GHz and 5GHz
API
- API and support: ROS Melodic, C/C++, Python, Java
- Simulation environment: Webots, Gazebo
- Control modes: remote control, ROS cmd_vel commands
- Feedback: battery voltage, motor currents, wheel odometry, control system status, temperature, safety status
Safety
- Stop button
- WiFi e-Stop
Environment
- Exterior (also unpaved roads)
- Temperature: from -10° C to +45° C